Для сборки шасси применяются универсальные детали с большим количеством крепежных отверстий, которые предназначены для установки дополнительных элементов конструкции, либо для установки электронных модулей системы управления роботом.
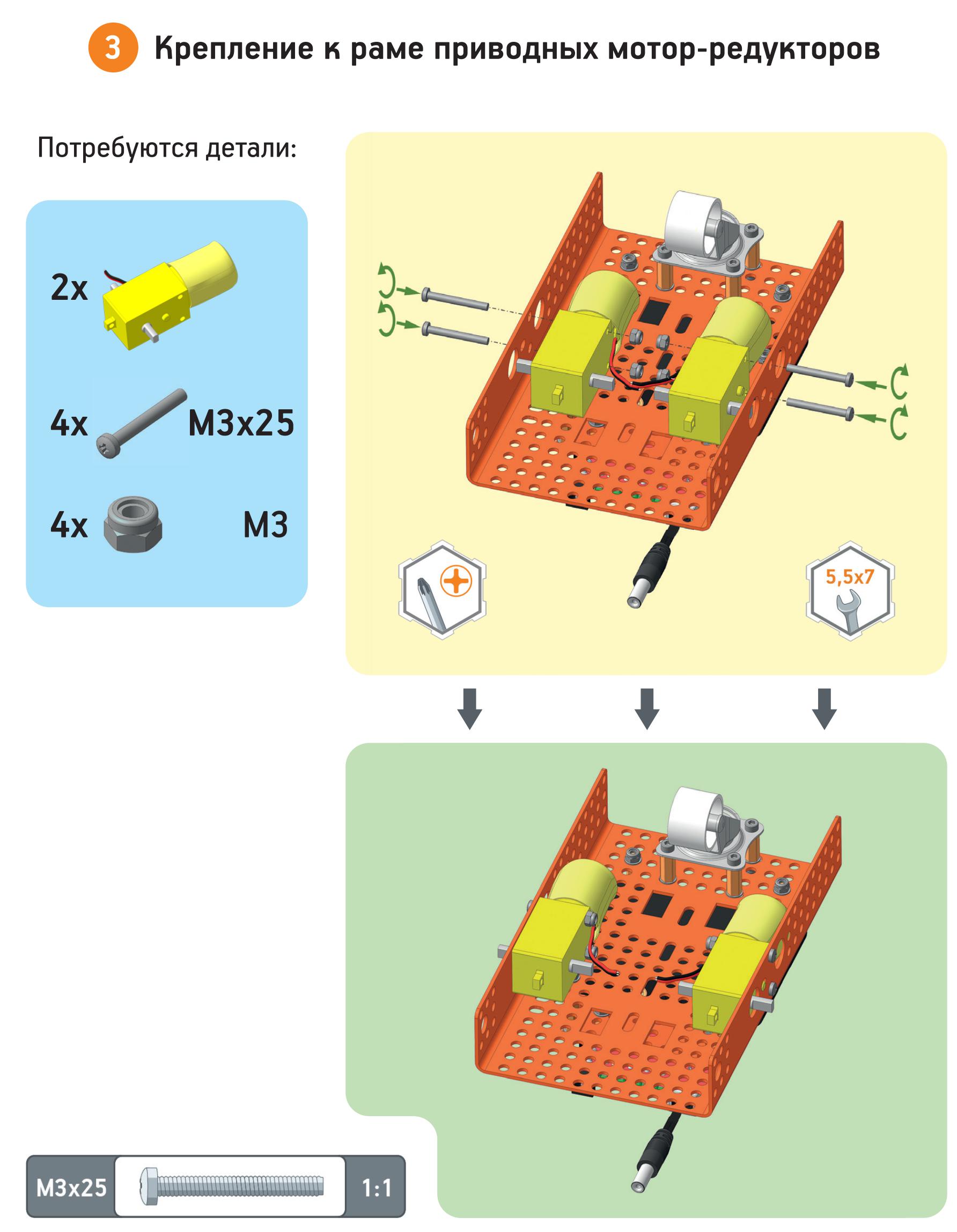
Управление трехколесным шасси осуществляется путем изменения направления или скорости вращения выходных валов электрических мотор-редукторов, установленных на правом и левом бортах рамы. Изменение направления вращения электродвигателей выполняется посредством смены полярности подаваемого напряжения. Скорость вращения моторов регулируются через изменение величины напряжения на них с помощью управляющего контроллера (управляющая электроника не входит в комплект набора для сборки шасси).
Благодаря имеющимся на раме крепежным отверстиям и возможности использовать дополнительные детали робототехнических конструкторов «Эвольвектор» шасси обладает широкой вариативностью в части собираемых моделей роботов.
Ниже в таблице приведены характеристики шасси.
| Наименование характеристики | Числовые значения |
| Количество мотор-редукторов, шт. | 2 |
| Номинальное напряжение питания моторов, вольт | 6 |
| Номинальный крутящий момент мотор-редукторов, Н·м | 0,15 |
| Диапазон скорости движения шасси, см/сек | 12...25 |
| Габаритные размеры (без навесной электроники), мм | 165х185х120 |
Правила пользования инструкцией по сборке
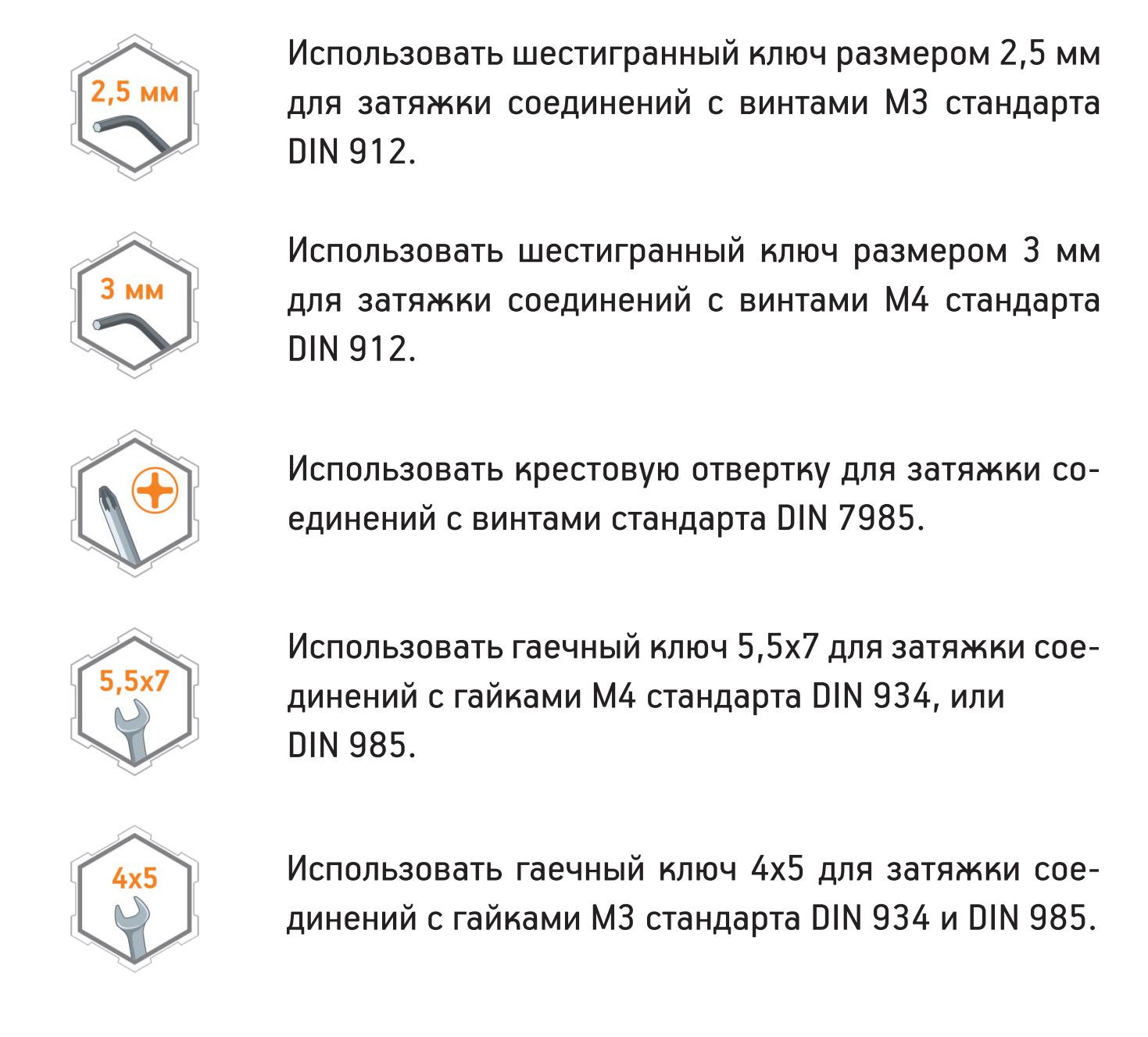
Конструкторы «Эвольвектор» являются инженерно-техническими. Это означает, что для соединения деталей в конструкциях и приведения их в движения применяются почти такие же инженерные решения, как и в промышленности. Используется резьбовой крепеж (винты, гайки, шайбы) и металлические детали. Поэтому сборка любого механизма, в том числе и указанного шасси, требует учета некоторых тонкостей. К ним относится например использование строго определенного инструмента для конкретной технологической операции сборки.
Для наглядного описания действий, выполняемых при сборке модели робота, на схемах могут приводиться следующие пиктограммы: